ปฏิสัมพันธ์ระหว่างเพลาขับเคลื่อนไฟฟ้าและรูปทรงเรขาคณิตของยานพาหนะเป็นสิ่งสำคัญของวิศวกรรมยานยนต์ที่ทันสมัยโดยเฉพาะอย่างยิ่งในบริบทของยานพาหนะไฟฟ้า (EVs) ในฐานะซัพพลายเออร์ของเพลาขับเคลื่อนไฟฟ้าการทำความเข้าใจความสัมพันธ์นี้เป็นพื้นฐานในการส่งมอบผลิตภัณฑ์ที่มีประสิทธิภาพสูงและเชื่อถือได้ให้กับลูกค้าของเรา
1. พื้นฐานของเพลาขับเคลื่อนไฟฟ้า
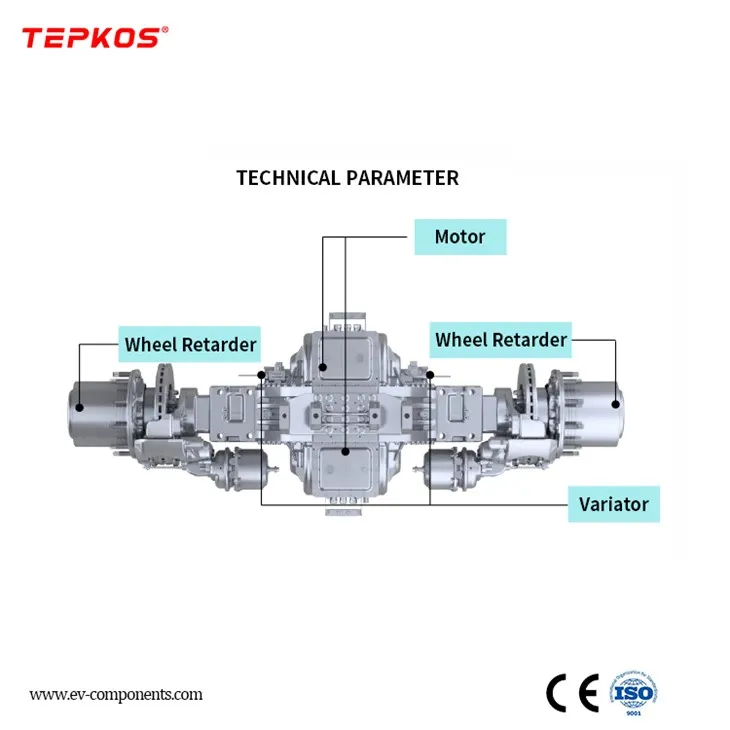
เพลาขับเคลื่อนไฟฟ้าเป็นองค์ประกอบสำคัญใน EV มันรวมมอเตอร์ไฟฟ้าอิเล็กทรอนิกส์พลังงานและระบบส่งกำลังเข้ากับหน่วยเดียว การรวมนี้ทำให้เค้าโครงระบบขับเคลื่อนง่ายขึ้นเมื่อเทียบกับยานพาหนะเครื่องยนต์สันดาปภายในแบบดั้งเดิม (ICE) มอเตอร์ไฟฟ้าในเพลาไดรฟ์จะแปลงพลังงานไฟฟ้าจากแบตเตอรี่เป็นพลังงานเชิงกลซึ่งจะถูกส่งไปยังล้อเพื่อขับเคลื่อนยานพาหนะ
เพลาไดรฟ์ไฟฟ้ามีประเภทต่าง ๆ เช่นเพลาความเร็วและหลาย - สปีด เพลาเดี่ยว - ความเร็วเป็นเรื่องธรรมดามากขึ้นในรถยนต์ผู้โดยสารไฟฟ้าจำนวนมากเนื่องจากความเรียบง่ายและต้นทุนที่ต่ำกว่า พวกเขามีช่วงแรงบิดกว้างด้วยความเร็วที่แตกต่างกันซึ่งเหมาะสำหรับสภาพการขับขี่ในเมือง ในทางกลับกันเพลาความเร็วหลายตัวสามารถเพิ่มประสิทธิภาพช่วงการทำงานของมอเตอร์ปรับปรุงประสิทธิภาพและประสิทธิภาพโดยเฉพาะอย่างยิ่งด้วยความเร็วที่สูงขึ้น ตัวอย่างเช่นในรถบรรทุกไฟฟ้าเพลาความเร็วหลายตัวสามารถจัดการกับโหลดหนักได้อย่างมีประสิทธิภาพมากขึ้น ตรวจสอบไฟล์เพลาไฟฟ้าสำหรับรถบรรทุกสำหรับรายละเอียดเพิ่มเติมเกี่ยวกับเพลาที่ออกแบบมาสำหรับการใช้งานหนัก
2. พื้นฐานของเรขาคณิตช่วงล่างของยานพาหนะ
รูปทรงเรขาคณิตช่วงล่างของยานพาหนะหมายถึงการจัดเรียงและการออกแบบส่วนประกอบช่วงล่างรวมถึงแขนควบคุมสปริงโช้คอัพและบาร์ต่อต้าน - ม้วน ฟังก์ชั่นหลักของระบบกันสะเทือนคือการขับขี่ที่สะดวกสบายโดยการแยกร่างกายยานพาหนะออกจากความผิดปกติของถนนรักษายางสัมผัสกับพื้นผิวถนนเพื่อการยึดเกาะและการจัดการที่ดีที่สุดและตรวจสอบให้แน่ใจว่ามีการจัดตำแหน่งล้อที่เหมาะสม
องค์ประกอบสำคัญของเรขาคณิตช่วงล่าง ได้แก่ Camber, Caster และ Toe Camber เป็นมุมของล้อที่สัมพันธ์กับแกนแนวตั้งเมื่อมองจากด้านหน้าหรือด้านหลังของยานพาหนะ Camber บวกหมายถึงด้านบนของล้อเอียงออกไปด้านนอกในขณะที่ Camber เชิงลบหมายถึงมันเอียงเข้าด้านใน Caster เป็นมุมของแกนพวงมาลัยเมื่อมองจากด้านข้างของยานพาหนะ นิ้วเท้าหมายถึงมุมของล้อเมื่อเทียบกับแกนตามยาวของยานพาหนะ การปรับพารามิเตอร์เหล่านี้อย่างเหมาะสมเป็นสิ่งสำคัญสำหรับประสิทธิภาพโดยรวมของยานพาหนะ
3. เพลาขับเคลื่อนไฟฟ้ามีปฏิกิริยาอย่างไรกับเรขาคณิตช่วงล่าง
3.1 การกระจายโหลด
เพลาขับเคลื่อนไฟฟ้าเพิ่มน้ำหนักให้กับยานพาหนะซึ่งมีผลต่อการกระจายโหลด ด้านหน้า - ล้อ - ขับเคลื่อนรถยนต์ไฟฟ้าน้ำหนักเพิ่มเติมของเพลาขับเคลื่อนไฟฟ้าที่ด้านหน้าสามารถเปลี่ยนอัตราส่วนน้ำหนักด้านหน้า - ไป - ด้านหลัง การเปลี่ยนแปลงการกระจายน้ำหนักนี้สามารถมีผลต่อพฤติกรรมของระบบกันสะเทือน ตัวอย่างเช่นมันอาจเพิ่มภาระบนสปริงช่วงล่างด้านหน้าทำให้พวกเขาบีบอัดมากขึ้น สิ่งนี้สามารถนำไปสู่การเปลี่ยนแปลงความสูงของการขับขี่ที่ด้านหน้าของยานพาหนะซึ่งจะส่งผลกระทบต่อมุมของ Camber และนิ้วเท้า ของเราไฟฟ้าเพลาได้รับการออกแบบโดยคำนึงถึงการเพิ่มประสิทธิภาพน้ำหนักเพื่อลดผลกระทบต่อการกระจายโหลด
3.2 ปฏิกิริยาแรงบิด
เมื่อมอเตอร์ไฟฟ้าในเพลาไดรฟ์สร้างแรงบิดเพื่อขับเคลื่อนล้อมันก็จะสร้างแรงปฏิกิริยา ปฏิกิริยาแรงบิดนี้สามารถทำให้ร่างกายของยานพาหนะหมุนรอบแกนตามยาว ในล้อหลัง - ขับเคลื่อนรถยนต์ไฟฟ้าปฏิกิริยาแรงบิดจากเพลาขับเคลื่อนไฟฟ้าด้านหลังสามารถยกด้านหน้าของยานพาหนะเล็กน้อย ระบบช่วงล่างจะต้องสามารถจัดการกับปฏิกิริยาแรงบิดนี้เพื่อรักษาเสถียรภาพและการจัดตำแหน่งล้อที่เหมาะสม บาร์ต่อต้าน - ม้วนมีบทบาทสำคัญในการต่อต้านการม้วนตัวที่เกิดจากปฏิกิริยาแรงบิดเพื่อให้มั่นใจว่าล้อยังคงสัมผัสกับพื้นผิวถนน
3.3 การสั่นสะเทือนและเสียงรบกวน
การทำงานของเพลาขับเคลื่อนไฟฟ้าสามารถสร้างการสั่นสะเทือนและเสียงรบกวน การสั่นสะเทือนเหล่านี้สามารถส่งผ่านระบบกันสะเทือนไปยังตัวถังยานพาหนะ ส่วนประกอบช่วงล่างเช่นโช้คอัพและบูชถูกออกแบบมาเพื่อลดการสั่นสะเทือนเหล่านี้ อย่างไรก็ตามการออกแบบเพลาขับเคลื่อนไฟฟ้ายังสามารถมีผลต่อระดับการสั่นสะเทือน ตัวอย่างเช่นมอเตอร์ไฟฟ้าที่สมดุลในเพลาไดรฟ์จะทำให้เกิดการสั่นสะเทือนน้อยลง รูปทรงของระบบกันสะเทือนสามารถปรับให้เหมาะสมเพื่อแยกตัวออกจากตัวรถออกจากการสั่นสะเทือนเหล่านี้ให้การขับขี่ที่เงียบและสะดวกสบายยิ่งขึ้น สำรวจของเราเพลารถยนต์ไฟฟ้าสำหรับเพลาที่ออกแบบมาเพื่อลดการสั่นสะเทือนและเสียงรบกวน
3.4 การเคลื่อนไหวของล้อ
ในระหว่างการทำงานของยานพาหนะปกติล้อจะเลื่อนขึ้นและลงขณะที่พวกเขาพบกับความผิดปกติของถนน เพลาไดรฟ์ไฟฟ้าจำเป็นต้องรองรับการเคลื่อนไหวของล้อนี้ในขณะที่ยังคงการส่งพลังงาน รูปทรงเรขาคณิตช่วงล่างกำหนดเส้นทางของการเคลื่อนไหวของล้อ ตัวอย่างเช่นในระบบกันสะเทือนแบบคู่ - wishbone แขนควบคุมอนุญาตให้ล้อเคลื่อนที่ในส่วนโค้งเฉพาะ การออกแบบของเพลาขับเคลื่อนด้วยไฟฟ้าควรเข้ากันได้กับการเคลื่อนไหวของล้อนี้เพื่อให้การทำงานราบรื่น หากเพลา จำกัด การเคลื่อนไหวของล้อมันสามารถนำไปสู่การสึกหรอก่อนวัยอันควรของส่วนประกอบช่วงล่างและประสิทธิภาพของยานพาหนะที่ลดลง
4. ข้อควรพิจารณาในการออกแบบเพื่อความเข้ากันได้
เมื่อออกแบบเพลาไดรฟ์ไฟฟ้าเข้ากันได้กับรูปทรงเรขาคณิตช่วงล่างของยานพาหนะเป็นสิ่งสำคัญที่สุด นี่คือข้อควรพิจารณาในการออกแบบที่สำคัญ:
4.1 จุดติดตั้ง
จุดติดตั้งของเพลาขับเคลื่อนไฟฟ้าไปยังเฟรมยานพาหนะหรือส่วนประกอบช่วงล่างจำเป็นต้องได้รับการออกแบบอย่างระมัดระวัง พวกเขาควรจะแข็งแรงพอที่จะทนต่อแรงที่เกิดจากเพลาขับเช่นปฏิกิริยาแรงบิดและโหลดถนน ในเวลาเดียวกันจุดติดตั้งควรช่วยให้มีความยืดหยุ่นในการรองรับการเคลื่อนไหวของระบบกันสะเทือน สิ่งนี้สามารถทำได้ผ่านการใช้บูชยางหรือองค์ประกอบการติดตั้งที่ยืดหยุ่นอื่น ๆ
4.2 ความยาวและความกว้างของเพลา
ความยาวและความกว้างของเพลาไดรฟ์ไฟฟ้าสามารถส่งผลกระทบต่อรูปทรงเรขาคณิตช่วงล่าง เพลาที่กว้างขึ้นอาจต้องใช้การออกแบบช่วงล่างที่แตกต่างกันเพื่อรักษาการจัดตำแหน่งล้อที่เหมาะสม ตัวอย่างเช่นในยานพาหนะที่มีเพลาไดรฟ์ไฟฟ้ากว้างแขนควบคุมอาจต้องยาวขึ้นหรือมีมุมที่แตกต่างกันเพื่อให้แน่ใจว่าล้อเคลื่อนที่ในเส้นทางที่ถูกต้อง
4.3 การรวมเข้ากับส่วนประกอบช่วงล่าง
เพลาขับเคลื่อนไฟฟ้าควรรวมเข้ากับส่วนประกอบช่วงล่างในลักษณะที่ช่วยลดสัญญาณรบกวน ตัวอย่างเช่นระบบการเดินสายและการระบายความร้อนของเพลาขับไม่ควรขัดขวางการเคลื่อนไหวของแขนควบคุมระบบกันสะเทือนหรือโช้คอัพ นอกจากนี้การออกแบบควรช่วยให้ง่ายต่อการบำรุงรักษาและการเปลี่ยนทั้งเพลาไดรฟ์และส่วนประกอบช่วงล่าง
5. ประโยชน์ของการมีปฏิสัมพันธ์ที่ดีที่สุด
เมื่อเพลาไดรฟ์ไฟฟ้าและรูปทรงเรขาคณิตของยานพาหนะได้รับการปรับให้เหมาะสมสำหรับความเข้ากันได้ประโยชน์หลายประการสามารถทำได้:
5.1 ประสิทธิภาพที่ดีขึ้น
ยานพาหนะจะมีการจัดการการลากและความมั่นคงที่ดีขึ้น รูปทรงเรขาคณิตช่วงล่างที่ดีที่สุดสามารถมั่นใจได้ว่าล้อจะมีการสัมผัสสูงสุดกับพื้นผิวถนนโดยเฉพาะอย่างยิ่งในระหว่างการเร่งความเร็วการเบรกและการเข้าโค้ง สิ่งนี้นำไปสู่การปรับปรุงประสิทธิภาพในแง่ของความเร็วการเร่งความเร็วและระยะทางเบรก
5.2 ความสะดวกสบายที่เพิ่มขึ้น
เพลาขับเคลื่อนไฟฟ้าและระบบกันสะเทือนแบบรวม - สามารถลดการสั่นสะเทือนและเสียงรบกวนให้การขับขี่ที่สะดวกสบายยิ่งขึ้นสำหรับผู้โดยสาร ระบบกันสะเทือนสามารถแยกร่างกายยานพาหนะออกจากความผิดปกติของถนนได้อย่างมีประสิทธิภาพและเพลาขับสามารถทำงานได้อย่างราบรื่นโดยไม่ทำให้เกิดการรบกวนมากเกินไป
5.3 อายุการใช้งานที่ยาวนานขึ้น
ปฏิสัมพันธ์ที่เหมาะสมระหว่างเพลาขับเคลื่อนไฟฟ้าและเรขาคณิตช่วงล่างสามารถลดความเครียดของทั้งสองส่วน สิ่งนี้นำไปสู่การสึกหรอน้อยลงส่งผลให้อายุการใช้งานส่วนประกอบยาวนานขึ้นและลดค่าใช้จ่ายในการบำรุงรักษาสำหรับเจ้าของยานพาหนะ

6. บทสรุปและเรียกร้องให้ดำเนินการ
การทำงานร่วมกันระหว่างเพลาขับเคลื่อนไฟฟ้าและรูปทรงเรขาคณิตช่วงล่างของยานพาหนะนั้นเป็นสิ่งที่ซับซ้อน แต่สำคัญในการออกแบบรถยนต์ไฟฟ้า ในฐานะซัพพลายเออร์ชั้นนำของเพลาขับเคลื่อนไฟฟ้าเรามุ่งมั่นที่จะจัดหาผลิตภัณฑ์ที่มีคุณภาพสูงซึ่งเข้ากันได้กับรูปทรงเรขาคณิตช่วงล่างต่างๆ ทีมผู้เชี่ยวชาญของเรามีประสบการณ์อย่างกว้างขวางในการออกแบบและผลิตเพลาขับเคลื่อนไฟฟ้าที่เพิ่มประสิทธิภาพประสิทธิภาพความสะดวกสบายและความทนทาน
หากคุณอยู่ในตลาดสำหรับเพลาขับเคลื่อนไฟฟ้าสำหรับยานพาหนะของคุณเราขอเชิญคุณติดต่อเราสำหรับการสนทนาโดยละเอียด เราสามารถให้บริการโซลูชั่นที่กำหนดเองตามความต้องการเฉพาะของคุณและช่วยให้คุณบรรลุประสิทธิภาพที่ดีที่สุดสำหรับยานพาหนะไฟฟ้าของคุณ ไม่ว่าคุณจะเป็นผู้ผลิตยานพาหนะหรือติดตั้งหลังการขายเราอยู่ที่นี่เพื่อสนับสนุนคุณในโครงการรถยนต์ไฟฟ้าของคุณ
การอ้างอิง
- Gillespie, TD (1992) พื้นฐานของการเปลี่ยนแปลงของยานพาหนะ สมาคมวิศวกรยานยนต์
- Crolla, DA (2001) แชสซียานยนต์: หลักการทางวิศวกรรม Butterworth - Heinemann
- คู่มือยานยนต์ Bosch (2007) Robert Bosch Gmbh