




วิดีโอแสดง
Drive By Wire Steering Kit: การควบคุมอิเล็กทรอนิกส์ที่แม่นยำสำหรับยานพาหนะที่ทันสมัย
เทคโนโลยีหลัก: สถาปัตยกรรมการควบคุมแบบสองทิศทาง
ตำแหน่ง - ระบบการป้อนกลับบังคับ
Dual - การรวมเซ็นเซอร์:
- เซ็นเซอร์แรงบิด (0.1n · m ความแม่นยำ) การจับอินพุตไดรเวอร์ในขณะที่เซ็นเซอร์มุม (ความละเอียด 0.5 องศา) ตำแหน่งพวงมาลัยมอนิเตอร์
- เซ็นเซอร์ปัจจุบันเพิ่มประสิทธิภาพการส่งพลังงานมอเตอร์ให้แน่ใจว่าประสิทธิภาพการใช้พลังงาน 90% - สำคัญสำหรับการเก็บรักษาแบตเตอรี่ EV
การควบคุมแบบสองทิศทาง: ประมวลผลข้อมูลแรงบิดและความเร็วของยานพาหนะ (ผ่านบัส Can Bus) เพื่อสร้างจริง - การตอบกลับถนนเวลา (เช่นด้ามจับยางพื้นผิวถนน) ผ่านโมดูลพวงมาลัยรักษาความรู้สึกขับรถตามธรรมชาติ

คุณสมบัติการออกแบบระบบ L4 SBW
|
ระดับ |
คุณสมบัติ |
ข้อกำหนดด้านความปลอดภัยในการทำงาน |
มาตรฐานระบบคุณภาพ |
สถาปัตยกรรมไฟฟ้ายานพาหนะ |
สถาปัตยกรรมซอฟต์แวร์ |
|
L4 |
ลวด - พวงมาลัยควบคุม + การจำลองความรู้สึกของถนน |
asil - d |
16949+ aspice -4+ iso26262 |
ตัวควบคุมโดเมนส่วนกลาง |
autosar |
|
ข้อกำหนดด้านสถาปัตยกรรมฮาร์ดแวร์ควบคุมพวงมาลัย |
|||||
|
เครื่องยนต์ |
ชิปควบคุมหลัก |
ความซ้ำซ้อนของเซ็นเซอร์ |
ขับเคลื่อนพลังงาน |
แหล่งจ่ายไฟ |
การสื่อสาร |
|
แปรง 6 เฟส |
(ฟังก์ชั่น + ล็อค - แกนขั้นตอน)*2 |
มุมพวงมาลัย*2, มุมมอเตอร์*2 |
ไดรฟ์วงจรซ้ำซ้อน |
แหล่งจ่ายไฟคู่ |
สามารถ - fd+can |
|
ข้อกำหนดด้านสถาปัตยกรรมการจำลองความรู้สึกของถนน |
|||||
|
แปรง 6 เฟส |
(ฟังก์ชั่น + ล็อค - แกนขั้นตอน)*2 |
แรงบิด*4, มุมพวงมาลัย*2, มุมมอเตอร์*2 |
วงจรไดรฟ์คู่ |
แหล่งจ่ายไฟคู่ |
สามารถ - fd+can |
โมดูลระบบ: ออกแบบมาเพื่อความน่าเชื่อถือ
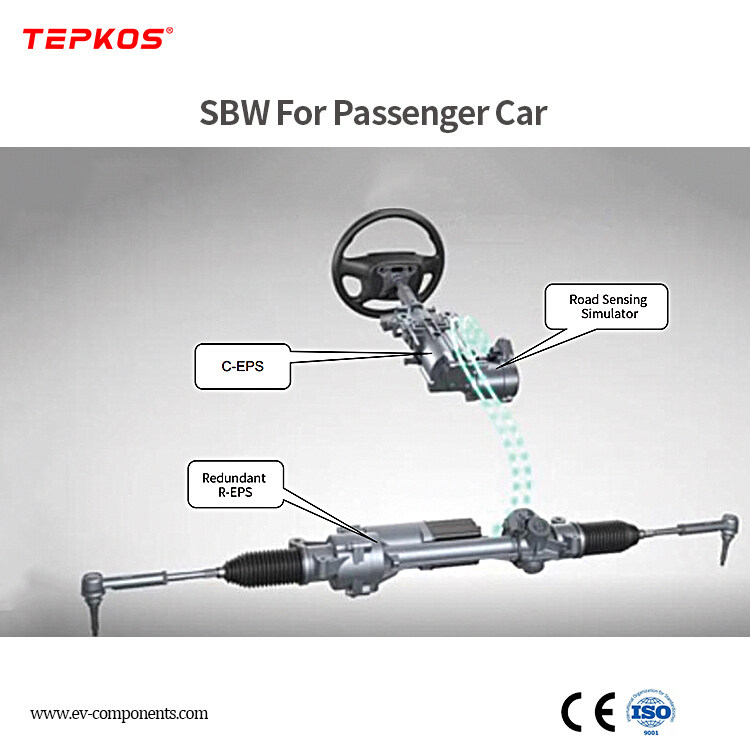
โมดูลพวงมาลัย
การออกแบบข้อเสนอแนะแบบสัมผัส: ใช้มอเตอร์ไร้แปรงเพื่อจำลองการสั่นสะเทือนของถนนด้วยโปรไฟล์ข้อเสนอแนะที่ปรับแต่งได้ (เช่นโหมดกีฬาเพื่อการต่อต้านที่เพิ่มขึ้น)
เซ็นเซอร์ซ้ำซ้อน: เซ็นเซอร์แรงบิดคู่/มุมตรวจจับการตรวจจับความผิดพลาด 99.9% ซึ่งสำคัญสำหรับความปลอดภัยในการขับขี่แบบอิสระ
ตัวควบคุมระบบ SBW
จริง - การประมวลผลเวลา: กระบวนการ MCU 32 บิต 20+ อินพุตเซ็นเซอร์ภายใน 50ms การปรับพวงมาลัยช่วยตามการเปลี่ยนแปลงของยานพาหนะ (เช่นลดความช่วยเหลือด้วยความเร็วสูงเพื่อความมั่นคง)
โปรโตคอล CANOPEN: รวมเข้ากับ ECUS ยานพาหนะสำหรับการแลกเปลี่ยนข้อมูล (มุมพวงมาลัยช่วยแรงบิด)
โมดูลการดำเนินการบังคับเลี้ยว
Direct - การออกแบบแอคทูเอเตอร์: มอเตอร์ไฟฟ้าไดรฟ์พวงมาลัยที่มีแรงบิด 1500n · m สูงสุดเปิดใช้งานความแม่นยำ 0.1 องศาในการวางแนวล้อ - เหมาะสำหรับเลน -
การป้องกัน IP67: ฝุ่น - แน่นและน้ำ - ความต้านทาน (1M submersion) เชื่อถือได้ในทุกสภาพอากาศ

ข้อดีของการใช้งานสำหรับยานพาหนะสมัยใหม่
ยานพาหนะไฟฟ้า (EVs)
การเพิ่มประสิทธิภาพพื้นที่: ลบการเชื่อมโยงเชิงกลทำให้พื้นที่ห้องโดยสารเพิ่มขึ้น 30% สำหรับการจัดวางแบตเตอรี่หรือการออกแบบตกแต่งภายใน
ประสิทธิภาพการใช้พลังงาน: ใช้พลังงานน้อยกว่าระบบไฮดรอลิก 40% ขยายช่วง EV 5-8%
การขับขี่อัจฉริยะและยานพาหนะอิสระ
l 2+ ความเข้ากันได้ของ ADAS: เปิดใช้งานการตอบสนองระดับมิลลิวินาที - สำหรับคุณสมบัติอัตโนมัติ (เช่นการเปลี่ยนเลนอัตโนมัติ, การบังคับเลี้ยวฉุกเฉิน)
ล้มเหลว - การทำงานที่ปลอดภัย: แหล่งจ่ายไฟและโปรเซสเซอร์ซ้ำซ้อนให้แน่ใจว่าการควบคุมพวงมาลัยแม้ในช่วงเดียว - ความล้มเหลวของส่วนประกอบ

วิศวกรรมคุณภาพ: สร้างขึ้นเพื่อความปลอดภัย
ระบอบการทดสอบที่เข้มงวด
การทดสอบความเหนื่อยล้า 10,000 รอบ: จำลองการขับขี่ 200,000 กม. เพื่อตรวจสอบความทนทานของมอเตอร์และเซ็นเซอร์
การปั่นจักรยานความร้อน: ดำเนินการ -40 องศาถึง +85 ระดับเพื่อให้มั่นใจถึงความน่าเชื่อถือในสภาพอากาศที่รุนแรง

คุณสมบัติของผลิตภัณฑ์
ชุดไดรฟ์ของเราโดย Wire Steering เป็นไปตามมาตรฐานอุตสาหกรรมที่เข้มงวด มันผ่านการทดสอบต่าง ๆ รวมถึงการทดสอบประสิทธิภาพการทดสอบความน่าเชื่อถือและการทดสอบความปลอดภัย เรามีการรับรองที่เกี่ยวข้องเพื่อพิสูจน์คุณภาพและการปฏิบัติตาม

ยกระดับพวงมาลัยยานพาหนะด้วยความแม่นยำทางอิเล็กทรอนิกส์
ชุดไดรฟ์ของเราโดยลวดพวงมาลัยการควบคุมพวงมาลัยใหม่สำหรับอนาคตของการเคลื่อนที่ - นำเสนอการทำงานที่แม่นยำมีประสิทธิภาพและปลอดภัยสำหรับ EVs และยานพาหนะอัจฉริยะ ได้รับการสนับสนุนจากการทดสอบที่เข้มงวดและ OEM - การออกแบบที่เป็นมิตรมันเป็นตัวเลือกที่เชื่อถือได้สำหรับแพลตฟอร์มยานพาหนะรุ่นต่อไป -
ติดต่อเราวันนี้เพื่อสำรวจว่าชุดของเราสามารถปรับปรุงความสามารถในการจัดการยานพาหนะและความสามารถอิสระของยานพาหนะของคุณได้อย่างไร - ออกแบบมาเพื่อความแม่นยำสร้างขึ้นสำหรับถนนข้างหน้า






